
Stay tuned for future updates!
LiDAR Preprocessing
High-level Architecture
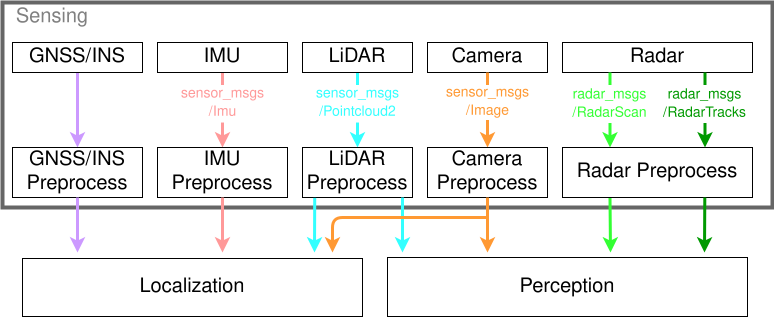
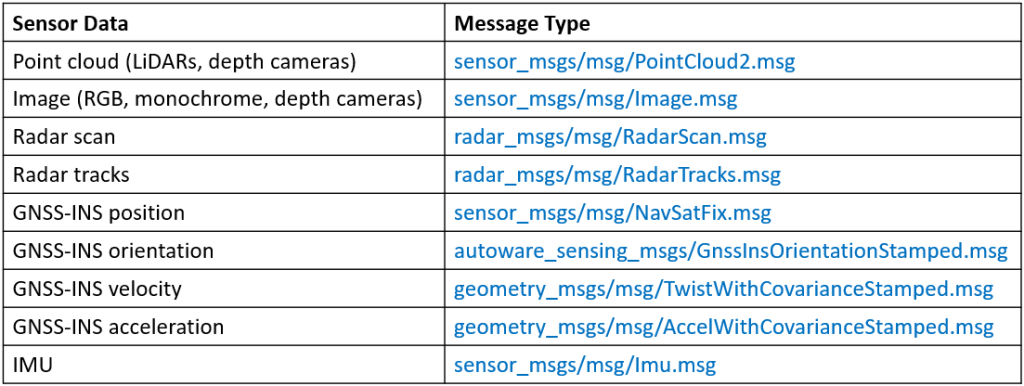
Input Types
LiDAR Preprocessing
A minimum amount of information is needed to produce correct results. Preprocessing provides sufficient statistics for further algorithms.
- Range & angle based filtering
- Ground filtering
- Voxel grids or other downsampling
- Static transforms into common frame
- Fuse into a single pointcloud
- Ego-motion is required for high speed use cases to correct for slewing
Reference
[1] Sensing Component Design, Link
Back to top of the page