
Stay tuned for future updates!
The Vehicle Interface component provides an interface between Autoware and a vehicle that passes control signals to the vehicle’s drive-by-wire system and receives vehicle information that is passed back to Autoware.
| Vehicle | Lateral Interface | Longitudinal Interface |
|---|---|---|
| Polaris GEM Vehicle | steering angle/rate | accel/brake pedal position |
| Lexus | steering angle | accel/brake pedal position |
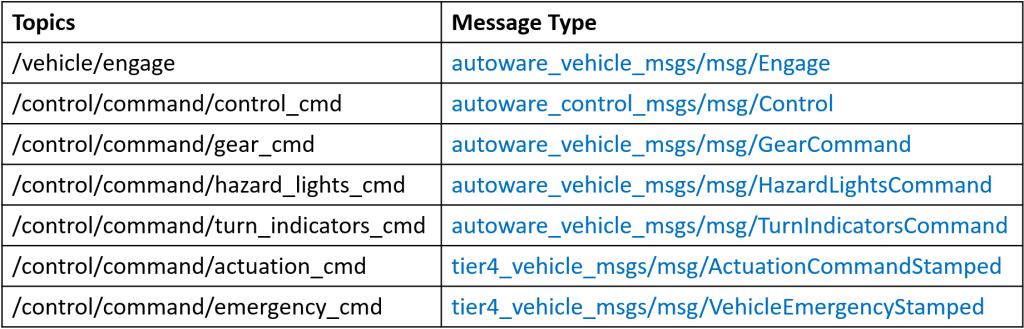
Input Topics: From AutowareAuto
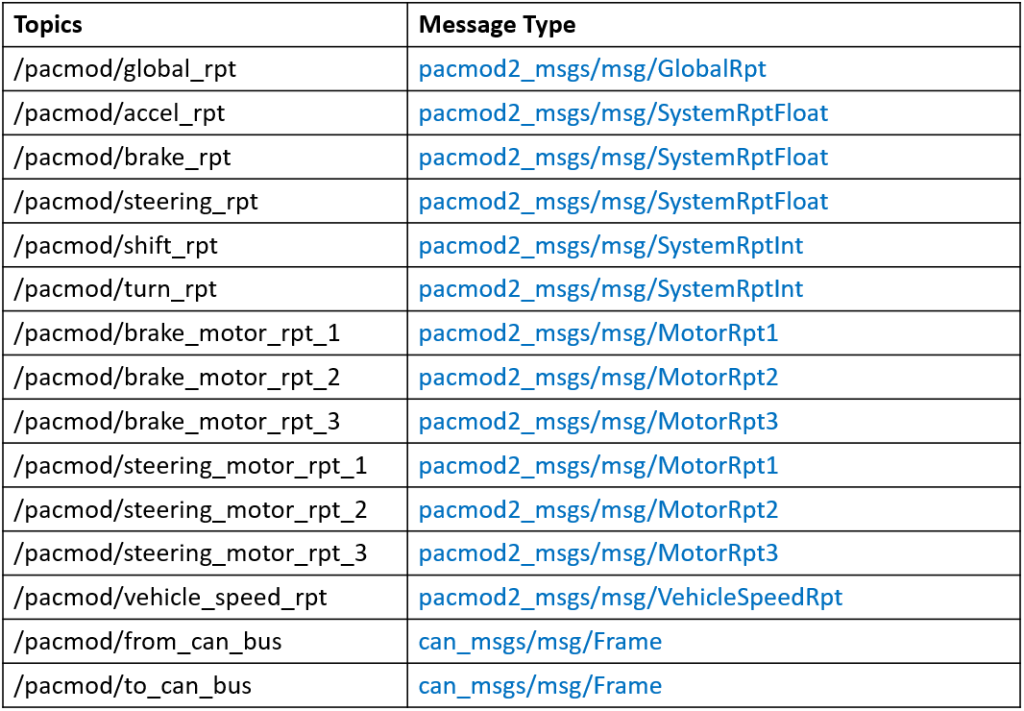
Input Topics: From PACMod2
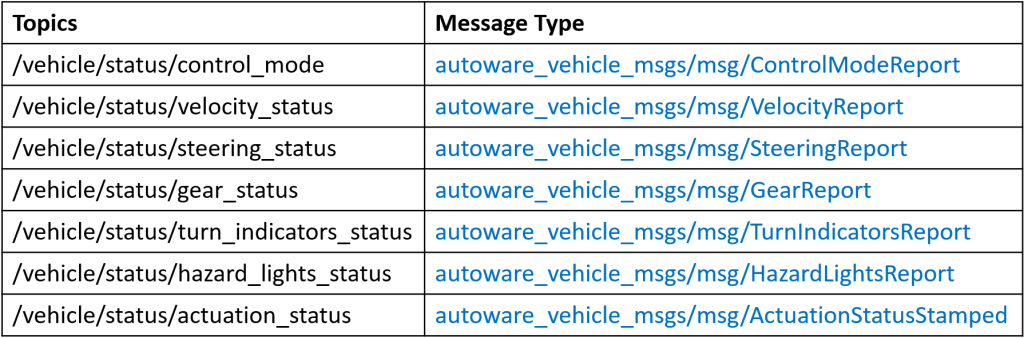
Output Topics: To AutowareAuto
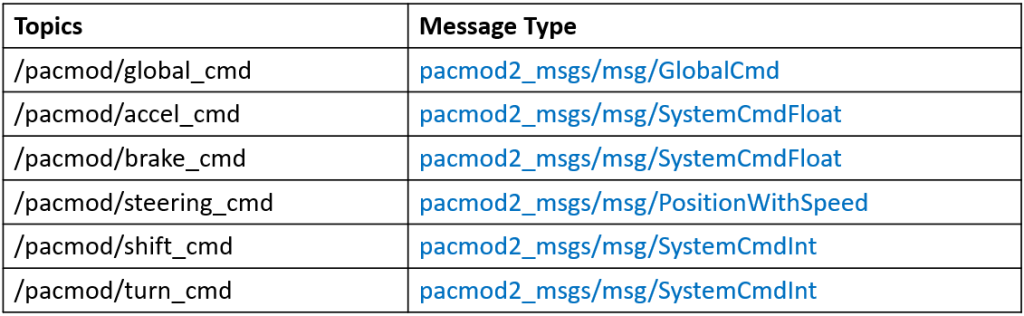
Output Topics: To PACMod2
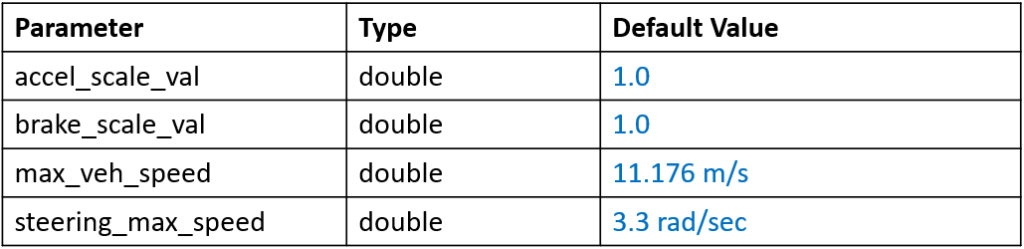
ROS Parameters
Architecture
Each component contains static nodes of Autoware, while each module can be dynamically loaded and unloaded (corresponding to C++ classes). The mechanism of the Vehicle Interface component is depicted by the following figures:
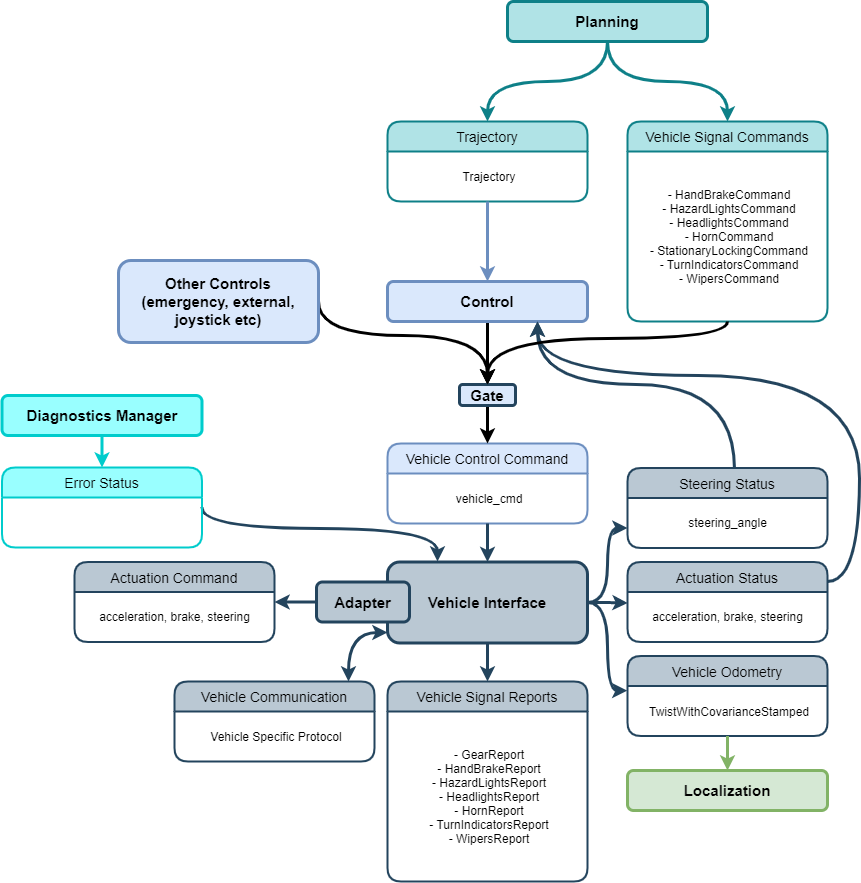
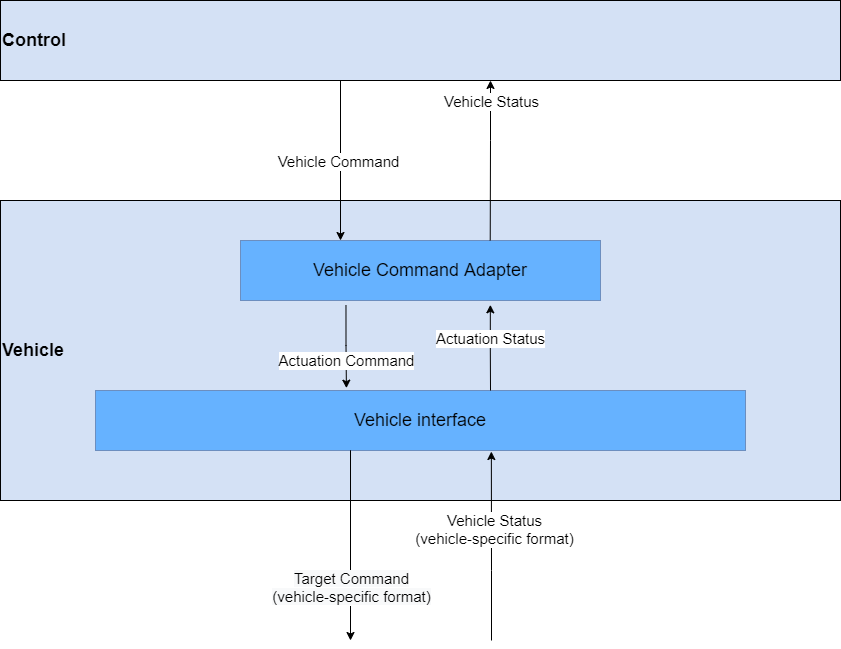
(1) Converting Autoware control commands to vehicle specific command
(2) Converting vehicle specific status information to Autoware status message
(3) Disengage autonomous driving via manual intervention
(4) Optional controls: turn indicator, hazard lights, etc
Reference
[1] Vehicle Interface Design, Link 1, Link 2
[2] PACMod3 Interface for AutowareAuto, Link
[3] PACMod2 Driver & PACMod2 Message, Link 1, Link 2,
[2] PACMod3 Interface for AutowareAuto, Link
[3] PACMod2 Driver & PACMod2 Message, Link 1, Link 2,
Back to top of the page