
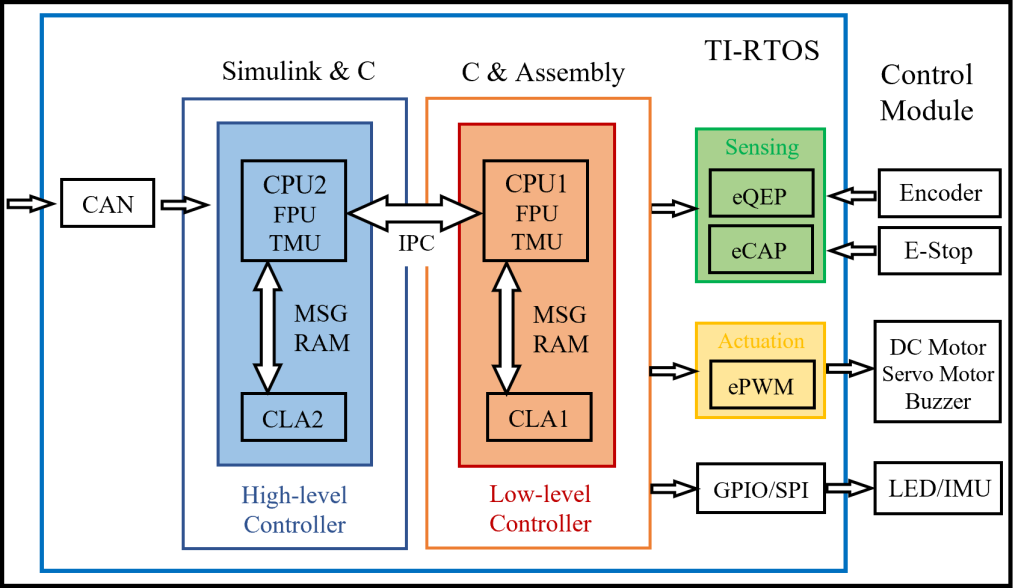
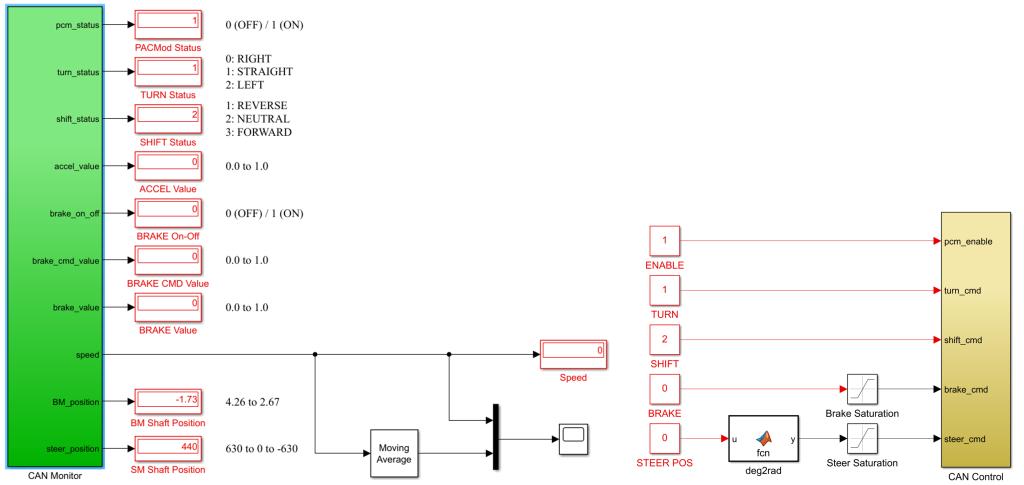
I developed a real-time control module (a.k.a. simplified dSPACE MicroAutoBox or Speedgoat target machine) using TI C2000 microcontrollers for hardware-in-the-loop (HIL) applications in electric vehicles, utilizing both CAN and Ethernet interfaces. The system architecture assigns one CPU and CLA group to handle low-level control tasks such as steering and motor actuation of the gas and brake pedals. The other CPU and CLA group is designated for higher-level control algorithms, including path tracking methods like pure pursuit or Stanley, as well as more advanced techniques like LQR and MPC, etc.
Back to top of the page