Skip to content
Welcome to Hang's Website
Patience saves my world!
Home
Projects
Self-Driving Car
Sensor Integration
Sensor Calibration
Vehicle Accel/Brake Calibration
ROS2 Software Stack Development
Sensing & Data Preprocessing
Perception
Localization & Mapping
Dynamics & Control
Vehicle Interface & PACMod2
Simulation
4D Radar Perception
Sensor Calibration
Real-time Control Module for HIL
Embedded System
Hardware Peripheral
STM32 Microcontrollers
TI MCU and MPU
TI C2000 Real-time Microcontrollers
TI ARM-based MCUs and MPUs
FPGA
Embedded Linux SBC
Simulink Embedded Coder
PCB Design
Dev Module
TI C2000 Dev Board
STM32 Dev Board
4D Imaging Radar
TI mmWave Radar
NXP mmWave Radar
Smartmicro mmWave Radar
mmWave Radar Signal Processing
Teaching
RC Hobbies
Awesome Website
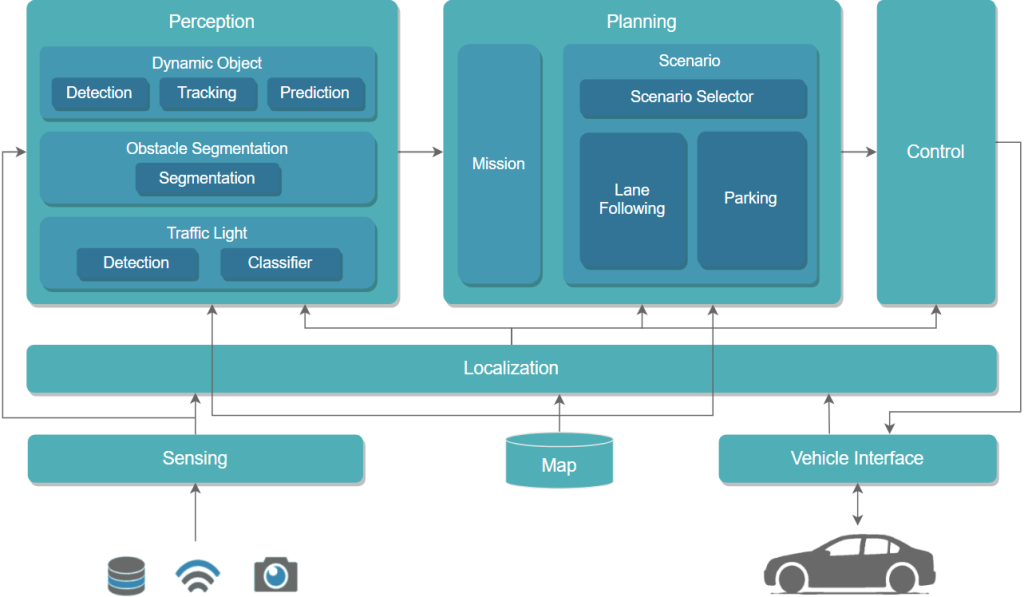
ROS2 Software Stack Development
ROS2 Software Stack Development
Sensing & Data Preprocessing
Perception
Localization & Mapping (SLAM/V-SLAM)
Planning
Dynamics & Control
Vehicle Interface & PACMod2
Simulation
ROS2 Resources
ROS2 (Humble) Documentation
ROS2 (Humble) Tutorials
ROS2 (Humble) Demos
ROS2 (Humble) Real-time Programming
Autoware.Auto Resources
The Autoware Foundation
Autoware Documentation
Autoware Documentation (Github)
Autoware Universe Documentation
Autoware (Github)
Autoware.Universe (Github)
Integrating Autoware
Autoware Open-source Software Stack (Copyright to The Autoware Foundation)
Back to top of the page
ABOUT ME
I am Dr. Cui, Hang, a software engineer at the
Center for Autonomy
of the University of Illinois Urbana-Champaign.
PROFICIENT IN
Real-time Embedded Systems
Perception and Signal Processing on Automotive 4D Imaging Radar
ROS/ROS2 Software Stack and Algorithms for Self-driving Cars
Please follow me on social media to stay updated:
GitHub
|
LinkedIn
PROTECTED
Learning Notes
Algorithms
Online Applications
RECENT POSTS
Comparison of ROS1 and ROS2
Comparison of TI and STM32 MCUs
Welcome to Hang’s website!
VISITOR MAP
Search
Search