Detection Range Min: 1.3 m / 0.6 m / 0.2 m / 0.1 m
Range Separation: ≤ 1.3 m / ≤ 0.6 m / ≤ 0.2 m / ≤ 0.1 m
Range Accuracy: ≤ 0.67 m / ≤ 0.3 m / ≤ 0.1 m / ≤ 0.05 m
Speed Min/Max: -340 km/h to +140 km/h / -60 km/h to +60 km/h
Speed Separation: < 0.3 m/s
Speed Accuracy: < 0.15 m/s
Field of View Azimuth: -65o/+65o / -70o/+70o
Field of View Elevation: -7.5o/+7.5o / -14o/+14o
Angle Accuracy Azimuth: ≤ 0.5o
Angle Accuracy Elevation: ≤ 0.5o
Speed: Automotive Ethernet @ 100 Mbps
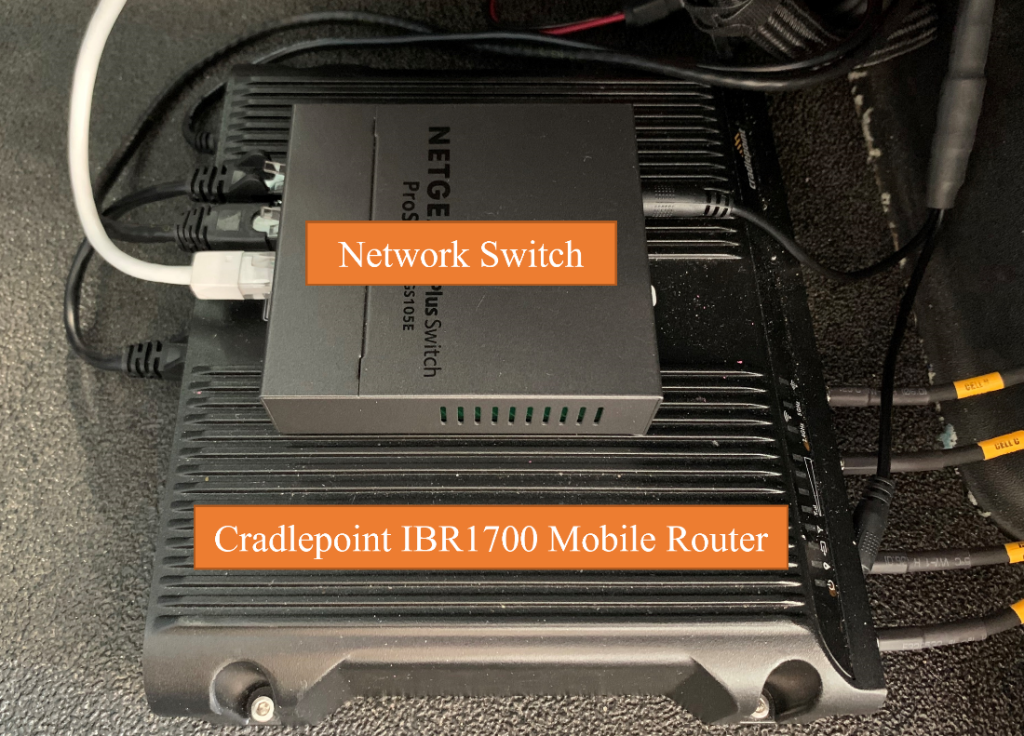
Copyright to Smartmicro Cradlepoint IBR1700 Mobile Router
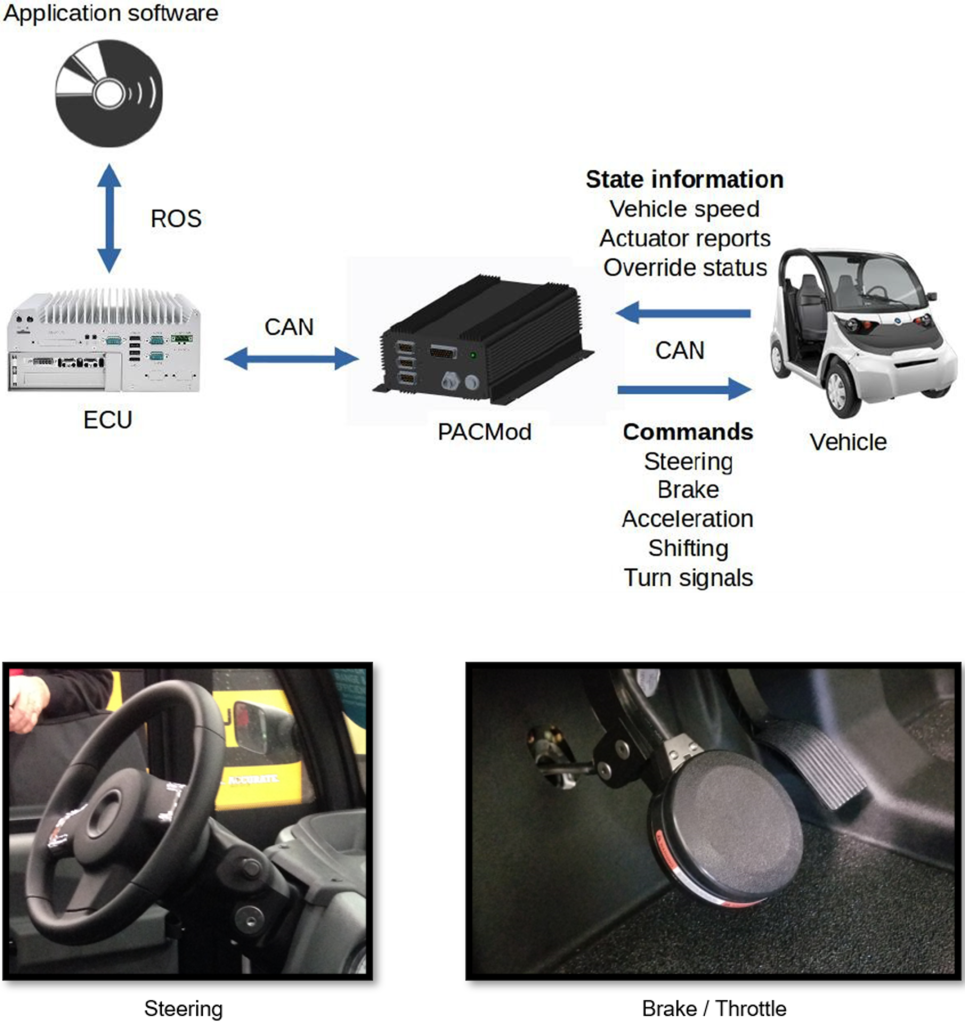
A SIM card with a data plan enables the Cradlepoint IBR1700 mobile router and network switch to provide Internet access to the computer when the Polaris GEM e4 vehicle operates outside the building.
Sensors (Archived)
NovAtel ProPak 6 & SPAN-IGM-S1
NovAtel ProPak-6D1SPAN-IGM-S1
Reference
[1] PACMod2, Link
[2] Septentrio AsteRx Sbi3 Pro+, Link
[3] Luxonis OAK-D Long Range, Link
[4] Livox HAP LiDAR, Link
[5] Ouster OS1-128 LiDAR, Link
[6] LUCID Triton 2.3MP Camera, Link
[7] Smartmicro Automotive Radar, Link