
- TMS320F28x7x General Purpose Digital I/O
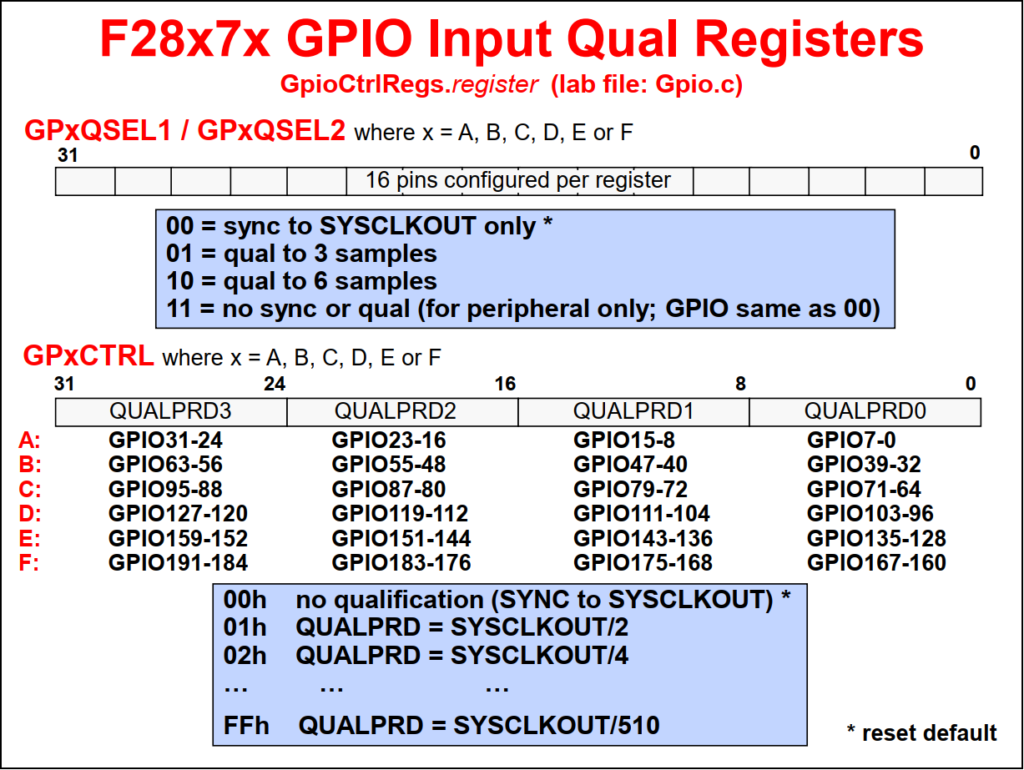
- TMS320F28x7x GPIO Input Qualification
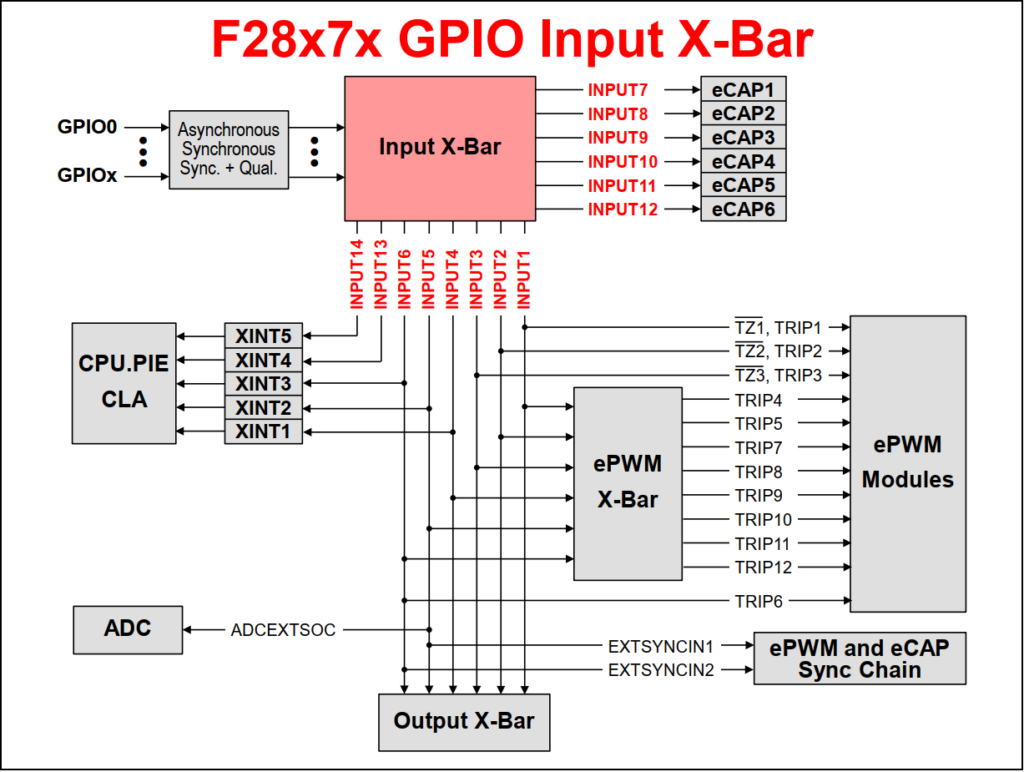
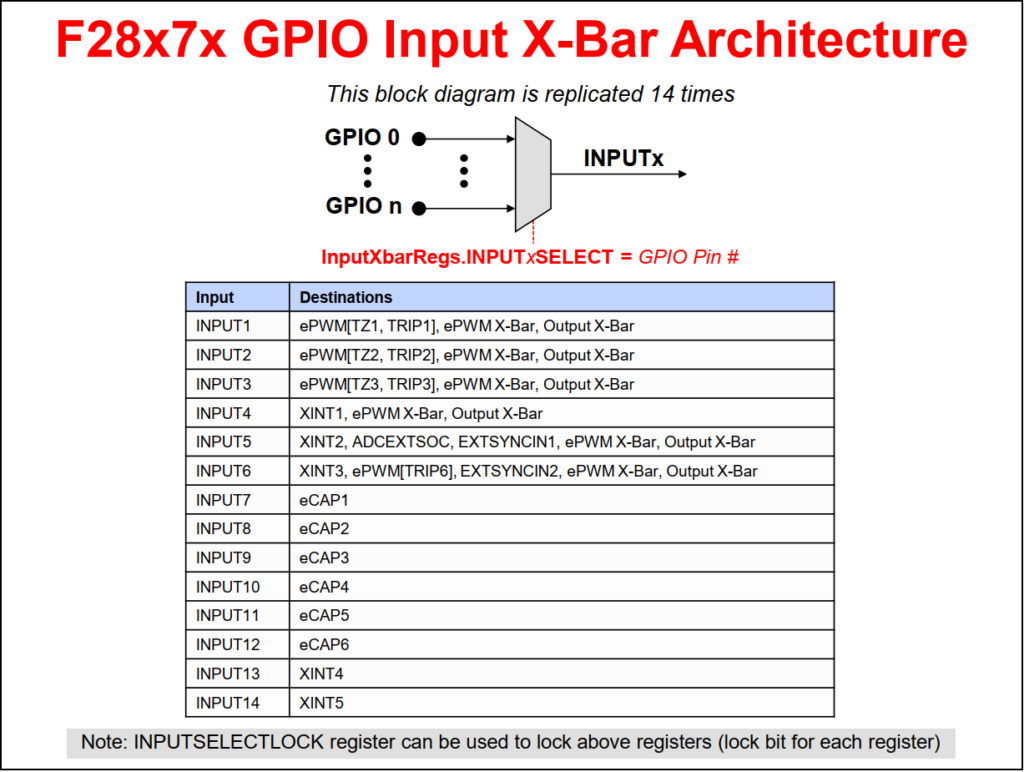
- TMS320F28x7x GPIO Input X-Bar
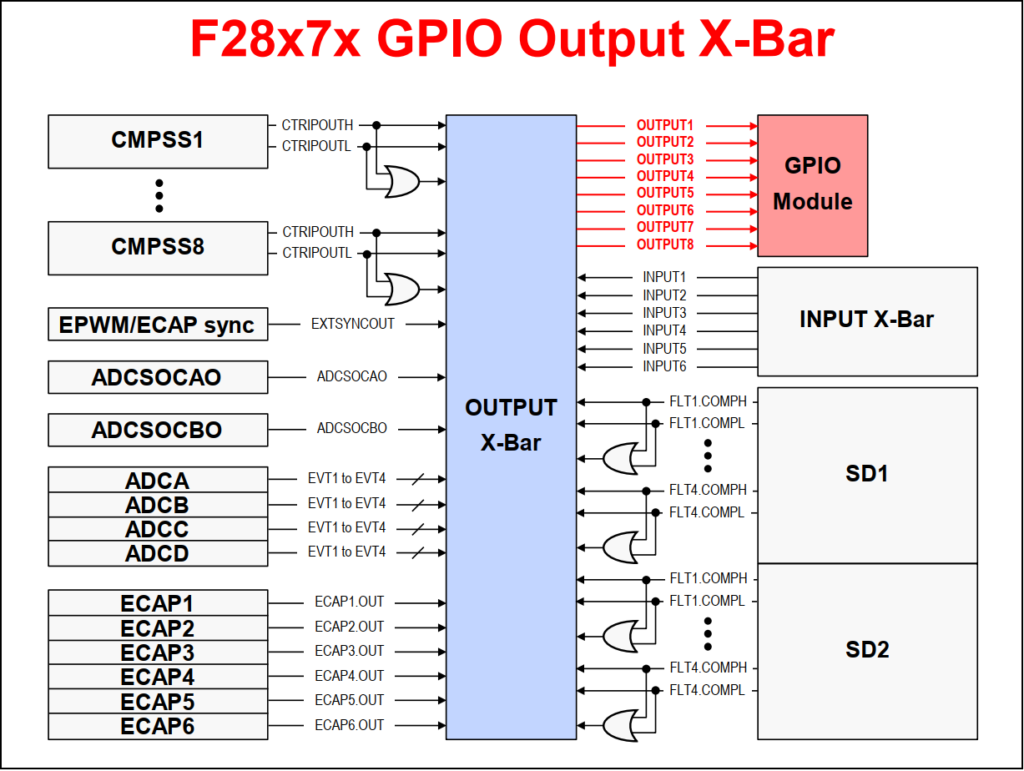
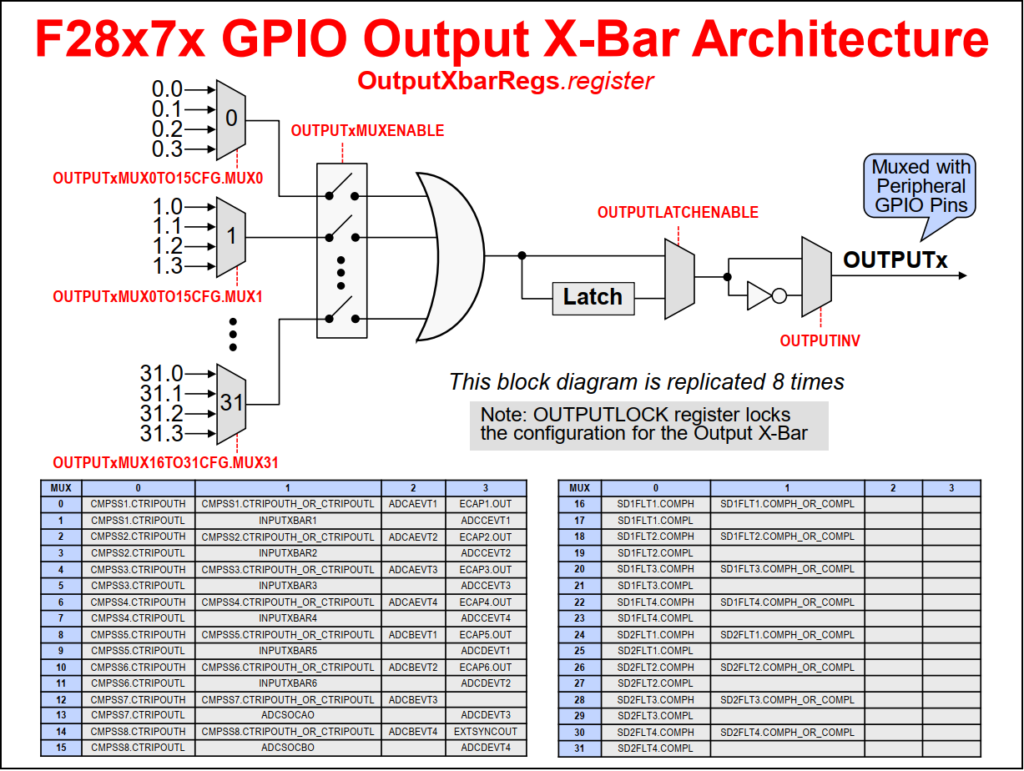
- TMS320F28x7x GPIO Output X-Bar
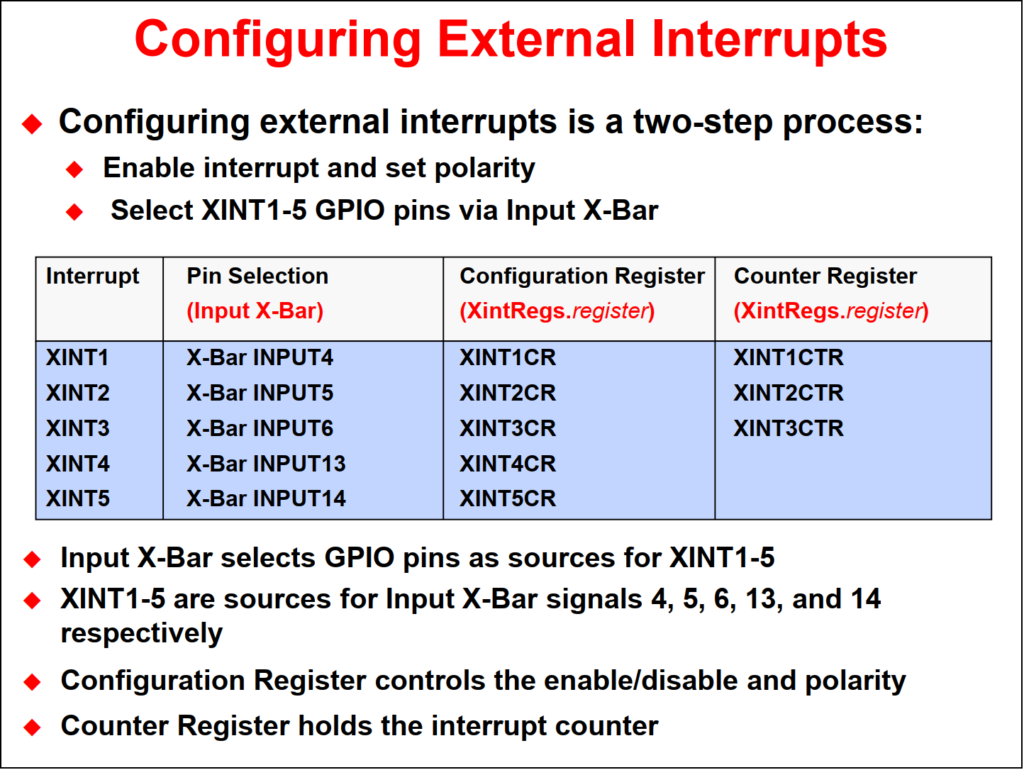
- TMS320F28x7x External Interrupts
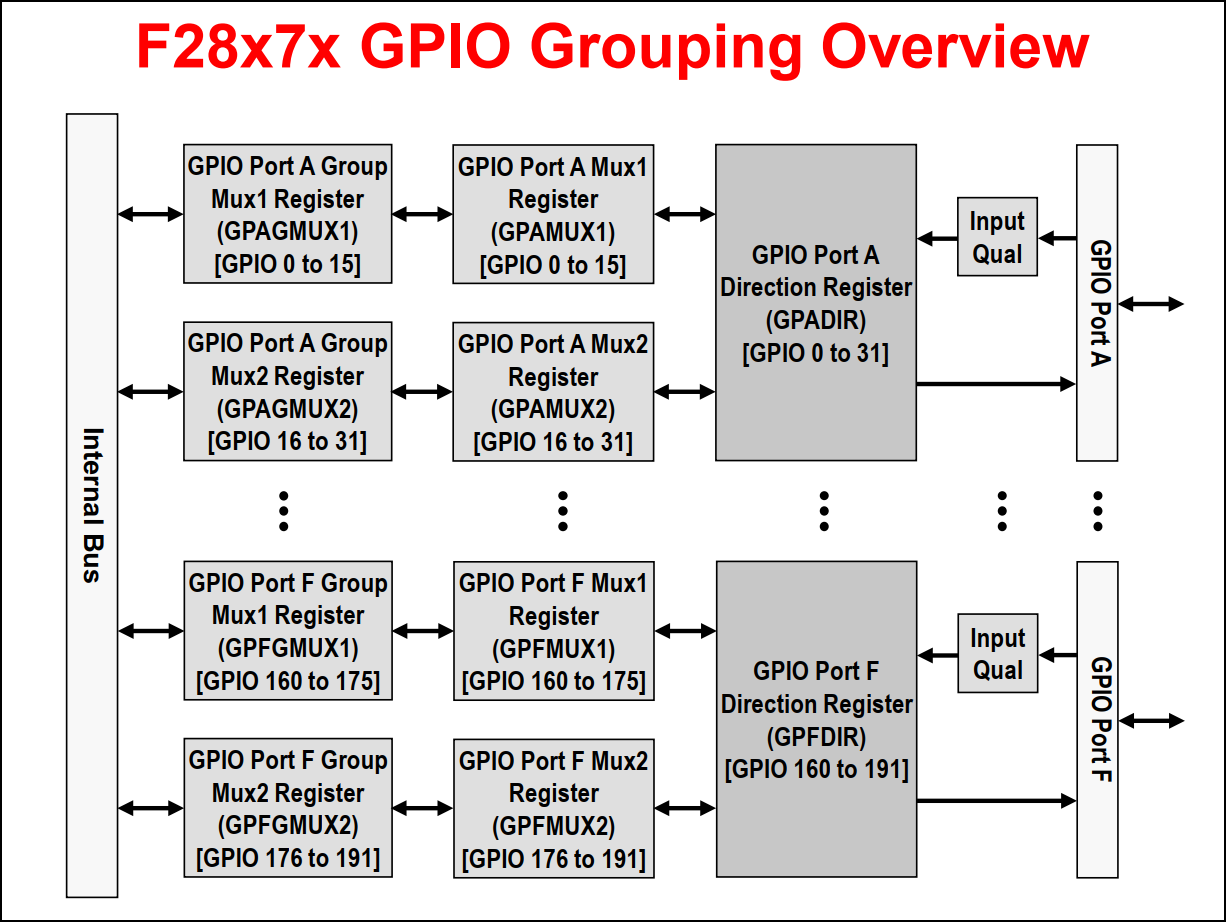
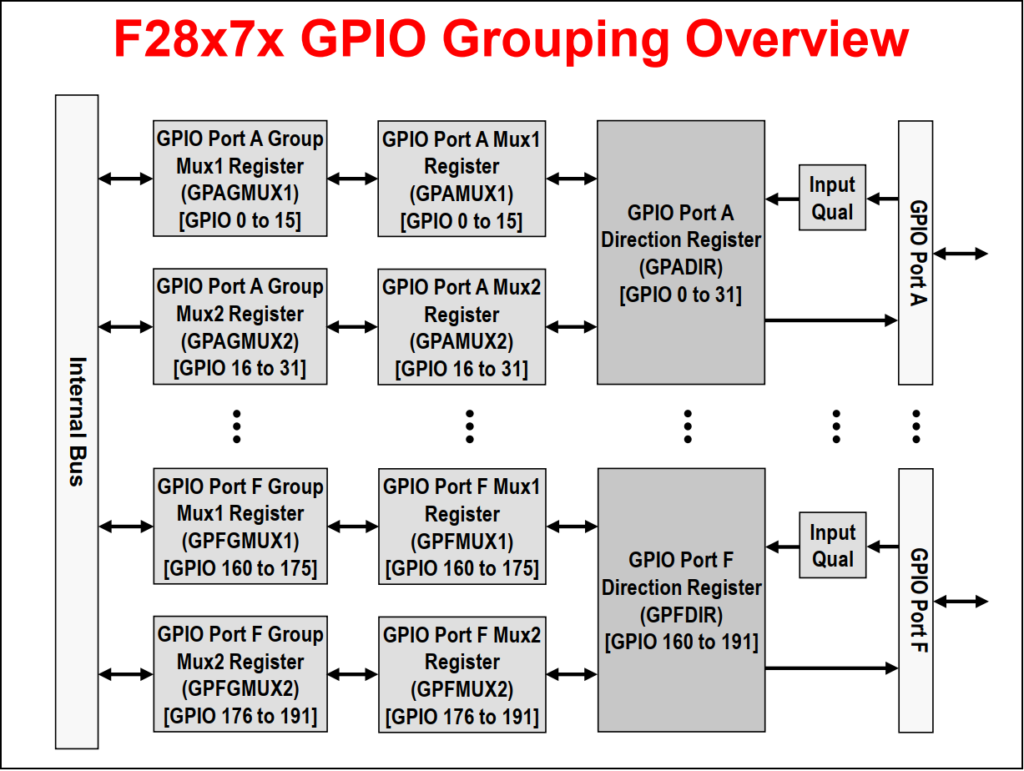
The F2837xD device incorporates a multiplexing scheme to enable each I/O pin to be configured as a GPIO pin or one of several peripheral I/O signals. Sharing a pin across multiple functions maximizes application flexibility while minimizing package size and cost. A GPIO Group multiplexer and four GPIO Index multiplexers provide a double layer of multiplexing to allow up to twelve independent peripheral signals and a digital I/O function to share a single pin.
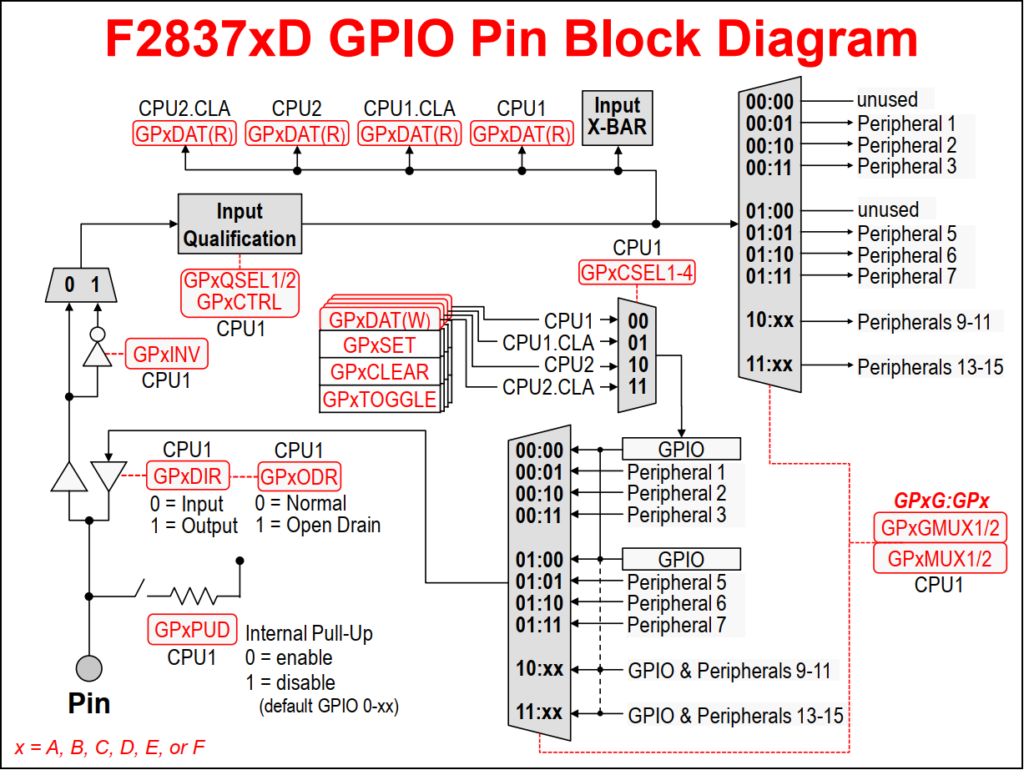
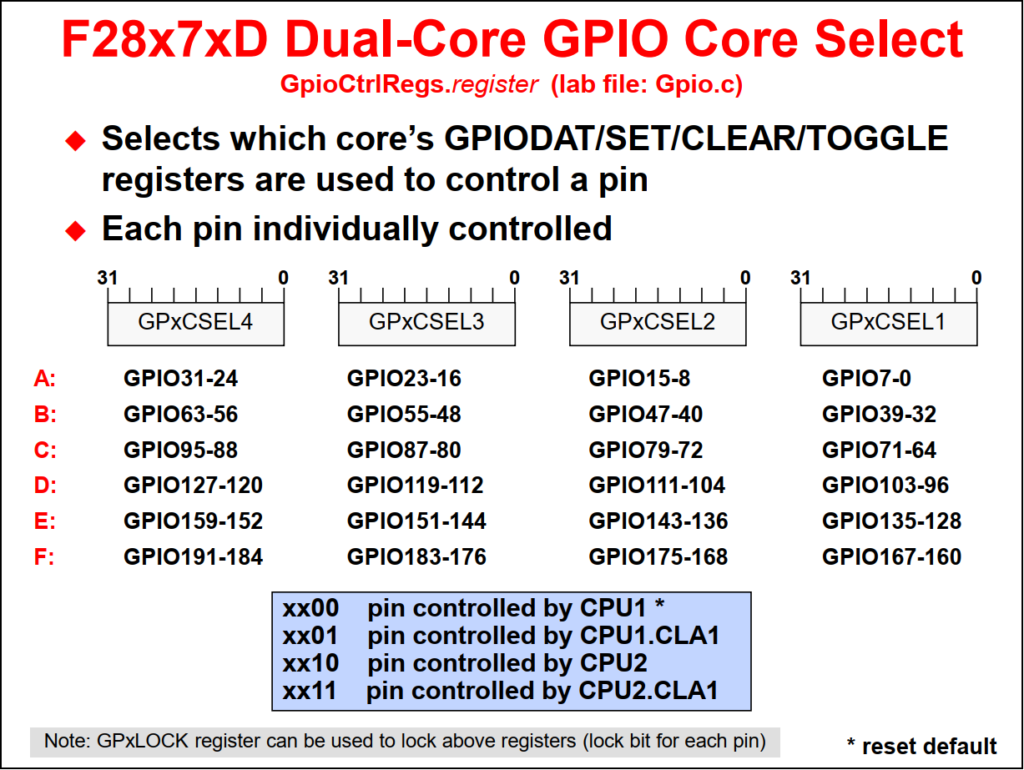
Each output pin can be controlled by either a peripheral or CPU1, CPU1 CLA, CPU2, or CPU2 CLA. However, the peripheral multiplexing and pin assignment can only be configured by CPU1. By default, all of the pins are configured as GPIO, and when configured as a signal input pin, a qualification sampling period can be specified to remove unwanted noise. Optionally, each pin has an internal pullup resistor that can be enabled in order to keep the input pin in a known state when no external signal is driving the pin.
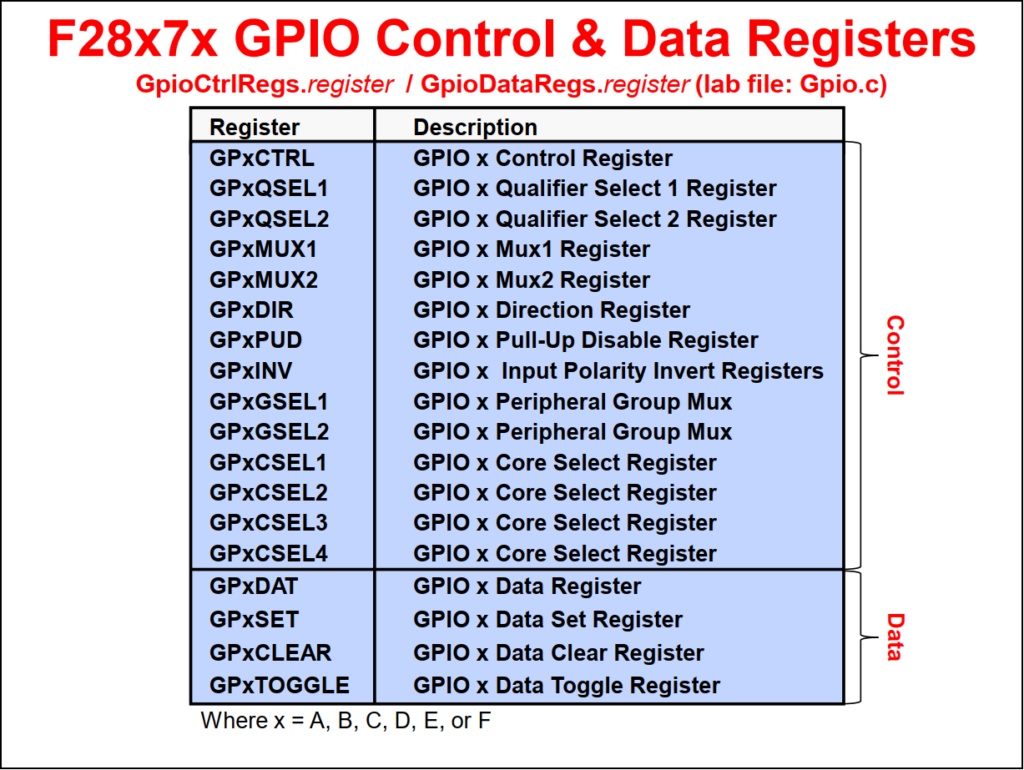
The I/O pins are grouped into six ports, and each port has 32 pins except for the sixth port which has nine pins (i.e. the remaining I/O pins). For a GPIO, each port has a series of registers that are used to control the value on the pins, and within these registers each bit corresponds to one GPIO pin.
If the pin is configured as GPIO, a direction (DIR) register is used to specify the pin as either an input or output. By default, all GPIO pins are inputs. The current state of a GPIO pin corresponds to a bit value in a data (DAT) register, regardless if the pin is configured as GPIO or a peripheral function. Writing to the DAT register bit field clears or sets the corresponding output latch, and if the pin is configured as an output the pin will be driven either low or high. The state of various GPIO output pins on the same port can be easily modified using the SET, CLEAR, and TOGGLE registers. The advantage of using these registers is a single instruction can be used to modify only the pins specified without disturbing the other pins. This also eliminates any timing issues that may occur when writing directly to the data registers.
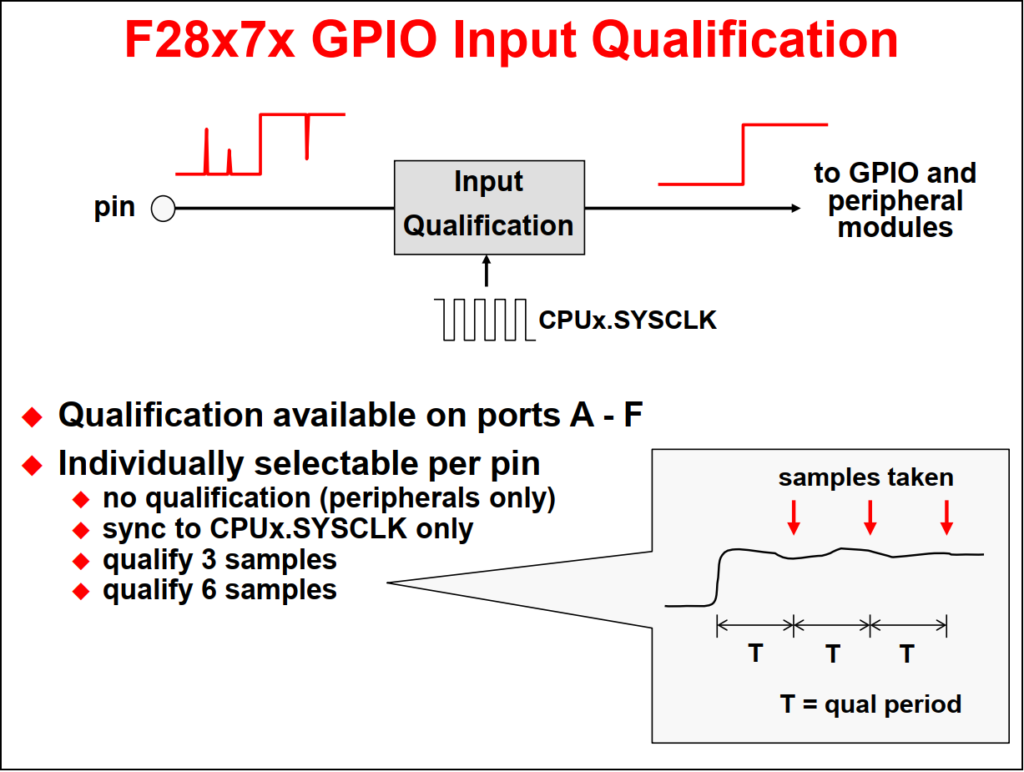
The input qualification scheme is very flexible, and the type of input qualification can be configured for each GPIO pin individually. In the case of a GPIO input pin, the qualification can be specified as only synchronize to SYSCLKOUT or qualification by a sampling window. For pins that are configured as peripheral inputs, the input can also be asynchronous in addition to synchronized to SYSCLKOUT or qualified by a sampling window.
The Input X-BAR is used to route external GPIO signals into the device. It has access to every GPIO pin, where each signal can be routed to any or multiple destinations which include the ADCs, eCAPs, ePWMs, Output X-BAR, and external interrupts. This provides additional flexibility above the multiplexing scheme used by the GPIO structure. Since the GPIO does not affect the Input X-BAR, it is possible to route the output of one peripheral to another, such as measuring the output of an ePWM with an eCAP for frequency testing.
The Output X-BAR is used to route various internal signals out of the device. It contains eight outputs that are routed to the GPIO structure, where each output has one or multiple assigned pin positions, which are labeled as OUTPUTXBARx. Additionally, the Output X-BAR can select a single signal or logically OR up to 32 signals.
- Five external interrupt signals: XINT1, XINT2, XINT3, XINT4 and XINT5
- Each can be mapped to any of GPIO pins via the X-Bar Input architecture
- XINT1, XINT2 and XINT3 also each have a free-running 16-bit counter that measures the elapsed time between interrupts. The counter resets to zero each time the interrupt occurs
Back to top of the page