
The scheduling algorithm is the software routine that decides which ready state task to transition into the running state.
Round Robin: this scheduler will ensure tasks that share priority are selected to enter the running state in turn. The Round Robin scheduling algorithm in FreeRTOS does not guarantee time is shared equally between tasks of equal priority, only that ready state tasks of equal priority will enter the running state in turn.
Fixed priority: this scheduler does not change the priority assigned to the tasks being scheduled but also does not prevent the tasked from changing their own priority or that of other tasks.
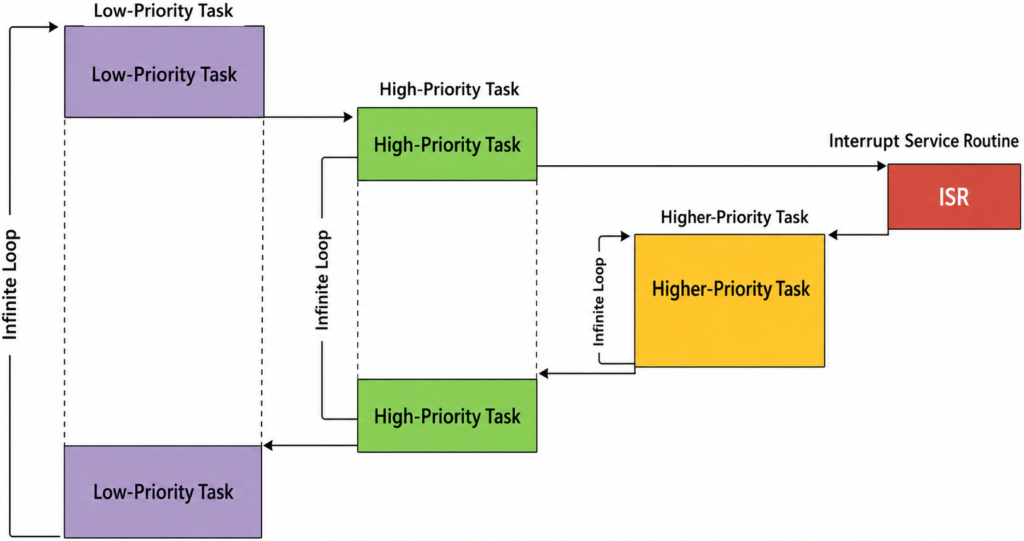
Pre-emptive: this scheduler will immediately preempt the running state task if a task that has priority higher than the running state task enters the ready state. Being pre-empted means being involuntarily moved out of the running state and into the ready state to allow a different task to enter the running state.
Time slicing: this scheduler shares processing time between tasks of equal priority, even when the task does not explicitly yield or enter the blocked state. Scheduling algorithms described as using time slicing will select a new task to enter the running state at the end of each time slice if there are other ready state tasks that have the same priority as running task.
// FreeRTOSConfig.h
#define configENABLE_FPU 1
#define configENABLE_MPU 0
// Priority-based preemptive scheduling
// Round-robin between equal priorities
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 0
#define configUSE_TICKLESS_IDLE 0
#define configUSE_QUEUE_SETS 1
#define configUSE_MUTEXES 1
#define configUSE_RECURSIVE_MUTEXES 1
#define configUSE_COUNTING_SEMAPHORES 1
#define configUSE_TASK_NOTIFICATIONS 1
#define configUSE_APPLICATION_TASK_TAG 0
#define configCPU_CLOCK_HZ (SystemCoreClock)
#define configTICK_RATE_HZ ((TickType_t)1000)
#define configMAX_PRIORITIES (56)
#define configMAX_TASK_NAME_LEN (16)
#define configMINIMAL_STACK_SIZE ((uint16_t)128)
#define configIDLE_SHOULD_YIELD 1
#define configUSE_16_BIT_TICKS 0
#define configQUEUE_REGISTRY_SIZE 8
#define configUSE_MALLOC_FAILED_HOOK 0
#define configCHECK_FOR_STACK_OVERFLOW 0
#define configSUPPORT_DYNAMIC_ALLOCATION 1
#define configSUPPORT_STATIC_ALLOCATION 1
#define configTOTAL_HEAP_SIZE ((size_t)(24*1024))
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configGENERATE_RUN_TIME_STATS 0
#define configUSE_TRACE_FACILITY 1
#define configUSE_STATS_FORMATTING_FUNCTIONS 1
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES 2
#define configUSE_TIMERS 1
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
#define configTIMER_QUEUE_LENGTH 5
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 1
#define INCLUDE_xQueueGetMutexHolder 1
#define INCLUDE_xTaskGetCurrentTaskHandle 1
#define INCLUDE_uxTaskGetStackHighWaterMark 1
#define configUSE_OS2_THREAD_SUSPEND_RESUME 1
#define configUSE_OS2_THREAD_ENUMERATE 1
#define configUSE_OS2_EVENTFLAGS_FROM_ISR 1
#define configUSE_OS2_THREAD_FLAGS 1
#define configUSE_OS2_TIMER 1
#define configUSE_OS2_MUTEX 1
#define USE_FreeRTOS_HEAP_4
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
#define USE_CUSTOM_SYSTICK_HANDLER_IMPLEMENTATION 0
#define configUSE_NEWLIB_REENTRANT 1
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )Back to top of the page